Characterization of PMSM motor with DC-supplied inverter
Base speed, feasible region of MTPA, and the constant current contour
This article aims to provide an approach to evaluate the overall performance of the motor-inverter combo for system-leveled purposes. Starting with a brief review of the well-known motor dynamic equations, the underlying structure, limitations, and characteristics of the system will be revealed. A commercially available motor “EMRAX228-HV” will be utilized as an example with all its parameters accessible online. Some basic understanding of Permanent Magnet motor (PM-motor) modeling and the Direct-Quadrature-Zero transformation will be helpful while joining this ride.
Permanent magnet synchronous motor (PMSM)
Skipping the derivations, let’s start with the well-known differential equations that govern the electrical dynamic from reference [1]. The variables “v” and “i” each stand for voltage and current pointing to the “direct, d” or the “quadrature, q” defined by the installation direction of the permanent magnet. On the other hand, constants “L”, “rₛ” and “λₘ” each refer to the stator winding inductance, resistance, and flux caused by the permanent magnet(s). Finally, the angular speed of the rotor “ω” was defined on the electrical frame and will require the pole-pair(s) “pp” to calculate the mechanical speed.

Steady-state relation
Focusing on the semi-static performance of the PMSM and with the fact that most motors will have a relatively insignificant winding resistance, time-depending terms as well as the winding resistance can be neglected. With that in mind, the static relation can be expressed as following equations where variables “v” and “i” were capitalized to emphasize the steady-state condition.

Constraints with DC-supplied inverter
As one might already guess from the title, the limitation of the DC voltage plays a crucial role in the operation of the PMSM. Considering that the maximum line-to-line voltage was exactly “Vdc”, the maximum amplitude can then be calculated as “Vdc/√3”, you may refer to reference [2] for a more rigorous background. Together with the steady-state relation, the voltage limitation can be expressed as the following inequality.

Operating modes
Examining the current-to-torque relation given in the last section, it is clear from the expression that multiple currents generate the same output torque. This motivates the development of technics that aimed to generate mechanical torque efficiently under different scenarios.
For simplicity reasons, the argument conducted in this section will only be precise for a non-salient motor (“Ld ~ Lq”, SPM). If that were the case, the following equations hold and can be visualized in the figure shown below. The same idea works similarly for salient motors (“Ld ≠ Lq”, IPM) but requires a few modifications.


Max torque per ampere (MTPA)
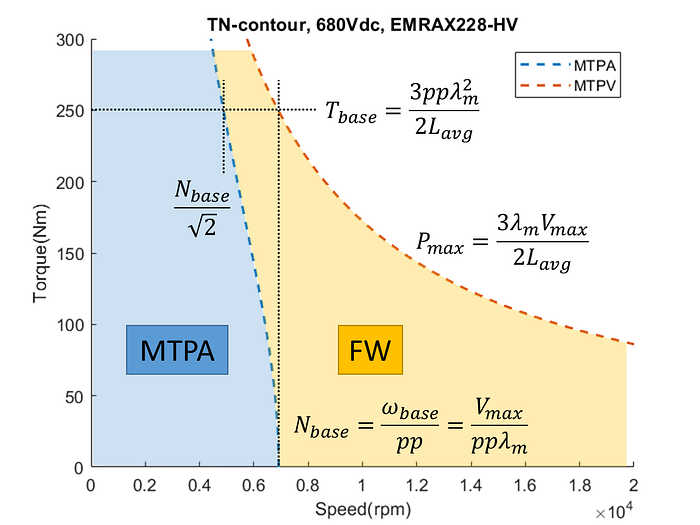
During a lower speed where the voltage constraint was not a concern, seeking the maximizing output torque under current constraint will lead to the so-called MTPA solution (alternatively, minimizing the current amplitude while maintaining the output torque) [3,4]. In the case of an SPM where saliency is negligible, MTPA simply implies “Id=0” while all the magnitude was pumped to “Iq” for maximum output torque, hence the almost vertical blue dashed line shown in the figure above.

Max torque/power per voltage (MTPV)
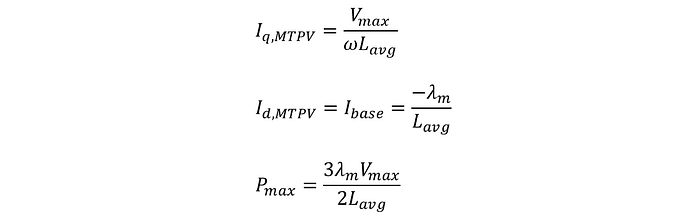
On the other side, seeking the maximum torque(also the power) limited by the voltage constraint under a constant speed will lead to the MTPV solution [5,6]. Similar to the current constraint in MTPA, the voltage constraint forms a circle centered at a common characteristic point at “Id = -Ibase = -λₘ/L”. This observation immediately reveals that the solution will spread along the vertical line passing such a point which was shown as the orange dashed line.
Field weakening (FW)
For other cases where both the current and the voltage constraint were active, the torque maximizing solution will sit between the MTPA and MTPV contours on the operating diagram. This type of operation was simply referred to as “Field weakening” since a negative “Id” is counteracting with the flux generated from the permanent magnet(s).
With some constant current limitation, the solutions that were traced along an increasing speed “ω” were shown as the arcs in the figure above. Notice that the solution will start from MTPA and gradually transit to MTPV if the current limitation is high enough (Imax > λₘ/L~300A).
T-N plot of characteristic curves
So far we have discussed various points and contours solely on the operating diagram spanning across the steady-state current. In this section, important features will be mapped to the Torque-Speed diagram to provide a better view from an application perspective.
Base speed and the feasible region of MTPA
As mentioned in the previous section, MTPA achieves minimal loss without considering the voltage limit. Chances are, some portion or the whole MTPA will violate the voltage constraint under a high enough speed. For instance, referencing to the operating diagram shown above, when the speed was faster than the characteristic point “ωbase = Vmax/λₘ”, the whole MTPA will become infeasible.

Notice that both the base speed “ωbase” and the maximum power “Pmax” will not only be affected by the motor design but also by the voltage supplied to the inverter.
Constant current contour
Another interesting diagram is to trace the TN curve along with an increasing speed under a constant current until it hits the MTPV or simply becomes infeasible. Such a diagram provides useful insight into the generated loss since it grows positively with the current magnitude.
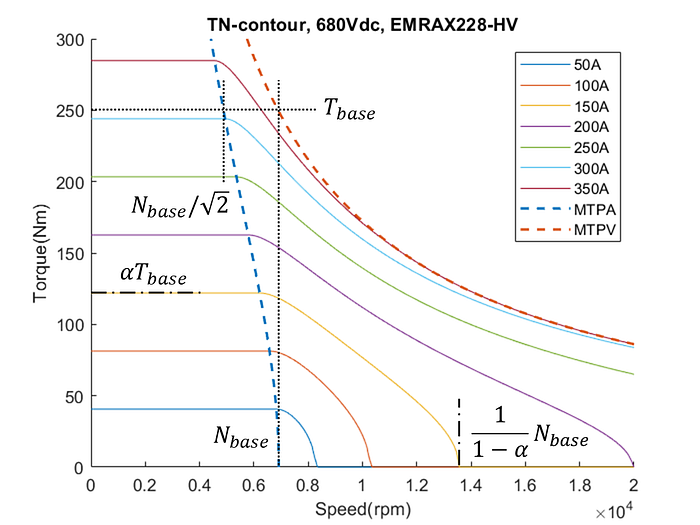
Something worth noticing is that for the current magnitude smaller than “λₘ/L”, or equivalently, has an MTPA torque smaller than “Tbase”, MTPV will not be reached and there will be a motor speed limitation. This was depicted as the traces terminating on the x-axis.
Other factors
Besides the ideal model utilized throughout this article, factors that will cause additional constraints or nonideality are also provided here for reference.
1. Limited heat dissipation: The heat generated in the motor need to be limited to satisfy the temperature limit.
2. Saturation in the magnetic core: Maximum torque was capped by the saturating magnetic strength of the core material.
3. Demagnetization of the PM: Field-weakening will push the permanent magnets toward its demagnetization direction, MTPV may not always be acceptable and should be evaluated carefully.
Conclusions and takeaways
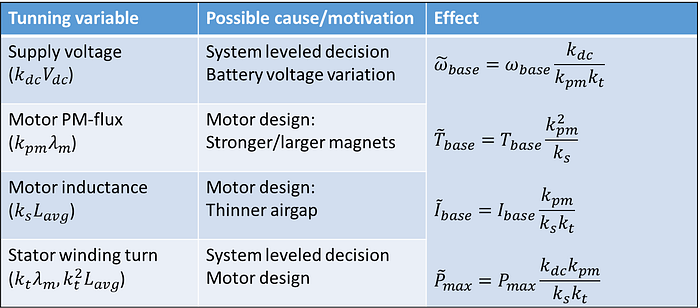
This article provides a simple approach to evaluate the performance of a known PMSM working with a DC-supplied inverter. You may decide on an optimal DC voltage that fit best given some motor or provides a preference/guidance to the motor design reversely. Governed by a few parameters, the relations between the component specifications and the system performances were captured in the following chart.
References
[1] P. Krause, O. Wasynczuk, and S. Sudhoff, ANALYSIS OF ELECTRIC MACHINERY AND DRIVE SYSTEMS, 2ND ED. Wiley India Pvt. Limited, 2010.
[2] A. M. Hava, R. J. Kerkman and T. A. Lipo, “Simple analytical and graphical methods for carrier-based PWM-VSI drives,” in IEEE Transactions on Power Electronics, vol. 14, no. 1, pp. 49–61, Jan. 1999, doi: 10.1109/63.737592.
[3] S. Morimoto, M. Sanada, and Y. Takeda, “Wide-speed operation of interior permanent magnet synchronous motors with high-performance current regulator,” IEEE Transactions on Industry Applications, vol. 30, no. 4, pp. 920–926, 1994.
[4] A. Hughes and B. Drury, “Chapter 9 — synchronous, permanent magnet and reluctance motors and drives,” in Electric Motors and Drives (Fifth Edition) (A. Hughes and B. Drury, eds.), pp. 307–373, Newnes, fifth edition ed., 2019.
[5] S. Morimoto, M. Sanada, and Y. Takeda, “Wide-speed operation of interior permanent magnet synchronous motors with high-performance current regulator,” IEEE Transactions on Industry Applications, vol. 30, no. 4, pp. 920–926, 1994.
[6] L. Sepulchre, M. Fadel, M. Pietrzak-David, and G. Porte, “Mtpv flux-weakening strategy for pmsm high speed drive,” IEEE Transactions on Industry Applications, vol. 54, no. 6, pp. 6081–6089, 2018.